I've been conducting researches about spatial data production and mapping in the urban areas with observation and image processing by using surveying, satellite remote sensing, photogrammetry and laser scanning.
[Activity Database, Kyoto University]
We can estimate the displacement by using multi-temporal satellite-borne synthetic aperture radar (SAR) data. Radar measures the amplitude and phase of the signal reflected by scatter(s). The phase difference between multiple observations can be converted into the displacement. Interferometric SAR or SAR interferometry (InSAR) esimates the relative height from a reference level. Differential InSAR (DInSAR) detects the displacement between the elevation derived from InSAR and another elevation, e.g. digital elevation model.
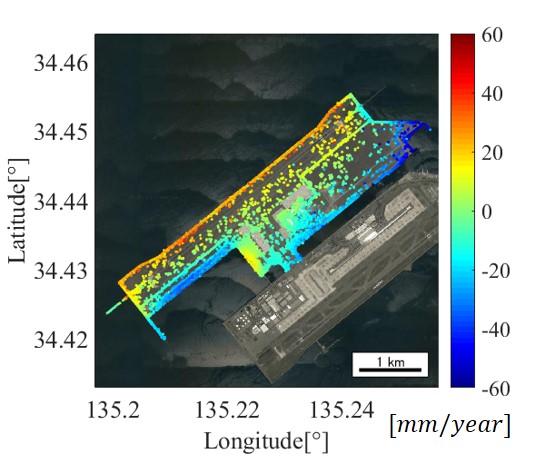
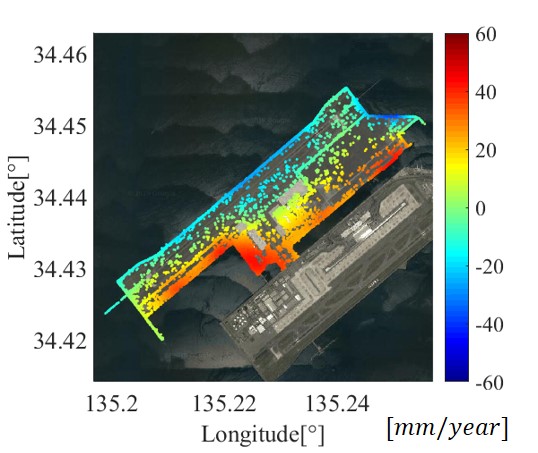
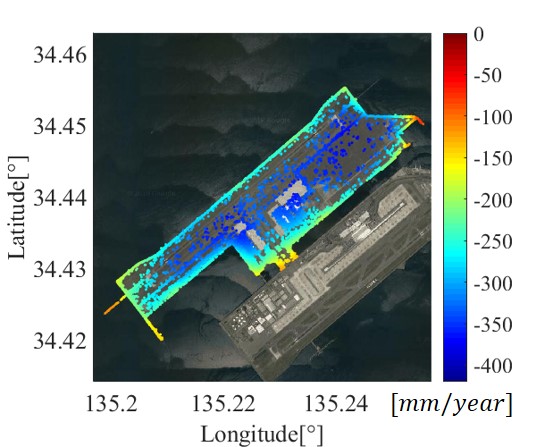
In addtion, time-series SAR analysis is now popular, that utilizes multi-temporal SAR images and estimates the displacement velocity. One of the most important algorithms is permanent scatterers interfrometry (PSI). We estimate 3D displacement velocity as follows. First, we estimate two displacement vectors along the radar line-of-sight (LOS) from images acquired on ascending and descending orbits, respectively. Then, we apply an interpolation technique, e.g. Kriging, to the global navigation satellite system (GNSS) data measured by Geospatial Information Authority of Japan (GSI) because the GNSS station data are sparsely away from each other, e.g. 10 to 20 km. Finally, east-west, north-south and vertical displacement components are derived by minimizing the sum of residual between the observations and the estimates.
(Left) East-west, (middle) north-south and (right) vertical displacement component of Island II of Kansai International Airport. They were estimated by using ALOS-2/PALSAR-2 images acquired in an UBS mode whose range and azimuth resolution are 3 m. The number of images used were 13 and 17 for ascending and descending orbit, respectively.
We developed a method for determining differential settlement (DS), the settlement mismatch between ground and buildings, from multi-temporal SAR images. Permanent scatterers originating from ground and man-made structures are used to determine the DS. For validation purposes, we demonstrate that the estimated DS in Bangkok is consistent with field observations.
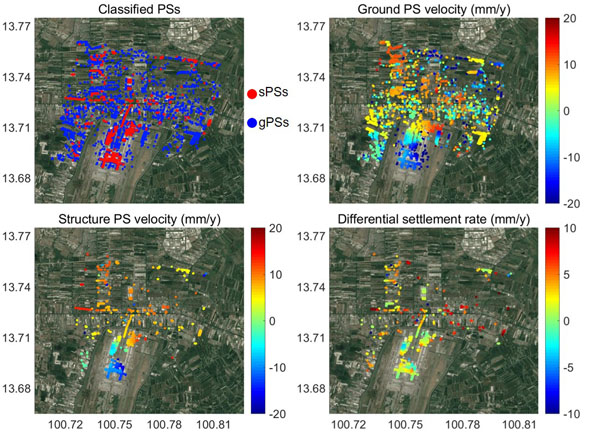
Differential settlement around Bangkok Suvarnabhumi International Airport: (Upper left) Classification of permanent scatterers. sPS and gPS denote scatterers originating from man-made structures and ground, respectively, (upper right) displacement velocity of gPS, (lower left) displacement velocity of sPS, and (lower right) velocity of differential settlement. We used 20 TerraSAR-X images for the analysis.
We developed an algorithm for estimating urban density from polarimetric SAR (PolSAR) images, and compare the urban density patterns of global megacities. This algorithm is unique from the viewpoint of estimating from a single fully Pol SAR image. The algorithm is capable of estimating the urban density in the areas where the statistis about urban development are not available.
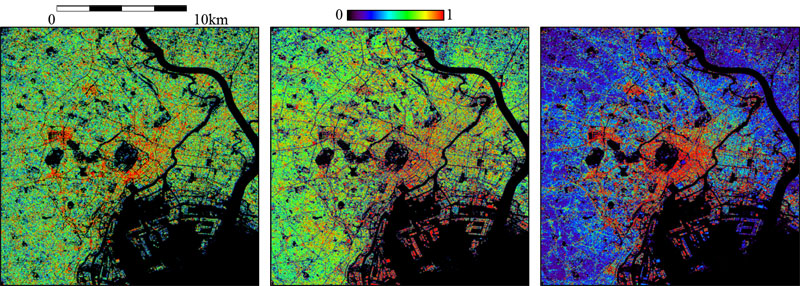
Results of urban density estimation for Tokyo. (Left) Urban density estimated from ALOS/PALSAR images obtained in a fully polarimetric mode, (middle) building-to-land ratio, and (right) floor area ratio. The building-to-land ratio and floor area ratio were generated from ZENRIN Zmap Town II.
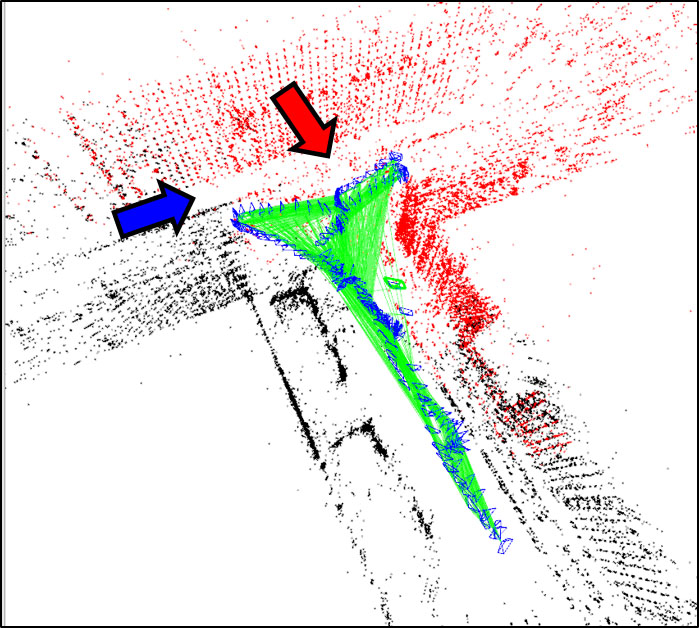
These years, construction sites have been introducing newly developed information and communication technology (ICT) for saving the labor and improving the work efficiency. We are conducting researches about the real-time 3D mapping and updating from the video images obtained by the camera attached at the construction machine. The fundamental analysis indicates that an existing algorithm, ORB SLAM2, can function to generate 3D map with an acceptable accuracy.
|
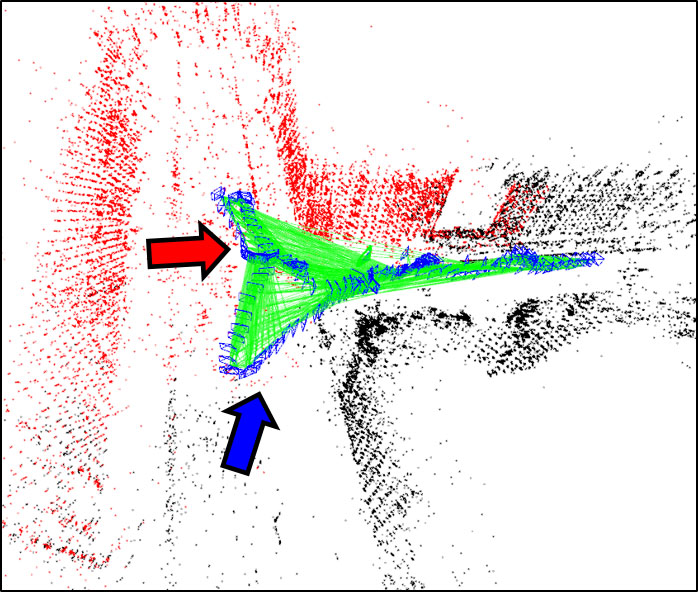
| Point clouds generated by using ORB SLAM2. Blue frame represent the location and orientation of the camera, black points are finally generated points, and red points are tentatively generated points. |


|
| Site for the experiment in Katsura Campus, Kyoto University. (Left) Viewpoint corresponding to the red arrow in the upper panel, and (right) viewpoint corresponding to the blue arrow in the upper panel |
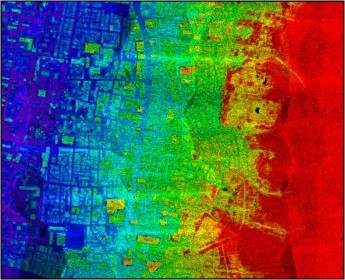
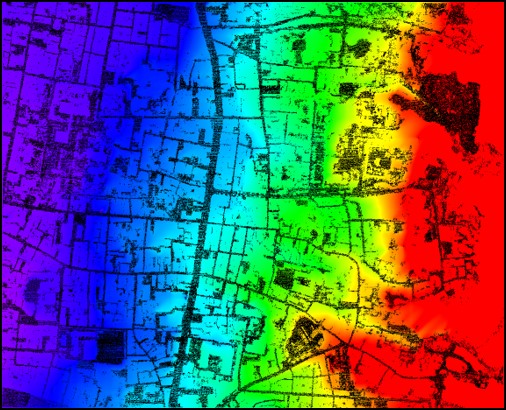
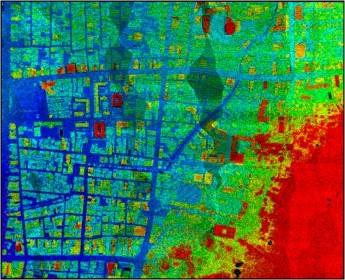
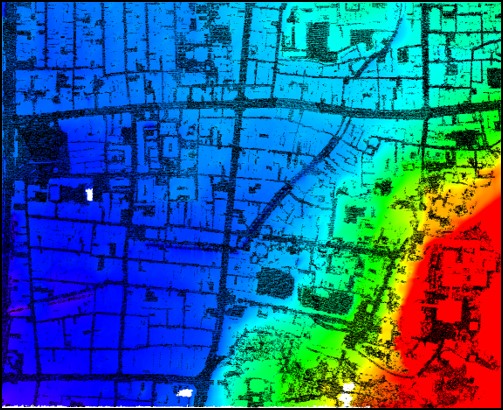
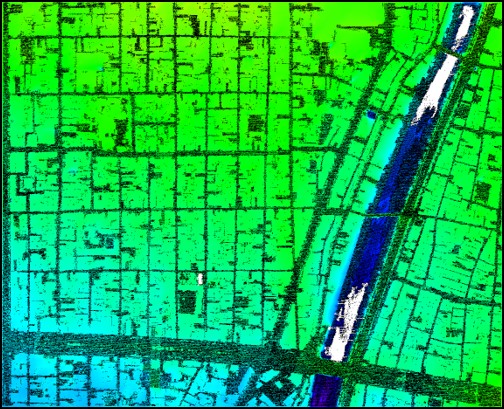
Airborne LiDAR obtains the digital surface model (DSM), the surface height of objects. Ground height, called as digital terrain model (DTM), can be derived via filtering technique from DSM. We developed a filtering algorithm that can be applied to the areas where different degrees of slope variation are interspersed.
|
|
|

|
||

|
|
|

|
||

|

|
|

|
||
| (Left) Study area for filtering, (middle) airborne LiDAR data, and (right) estimated DTM. | ||
We developed an algorithm for distinguishing vegetation point clouds from non-vegetation in order to estimate green space ratio (GSR). It uses voxel and calculates the statistical features representing the dispersion pattern of points. Then, it extracts the vegetation voxels. In addition, multi-scale analysis contributes to the improvement of the vegetation extraction accuracy.
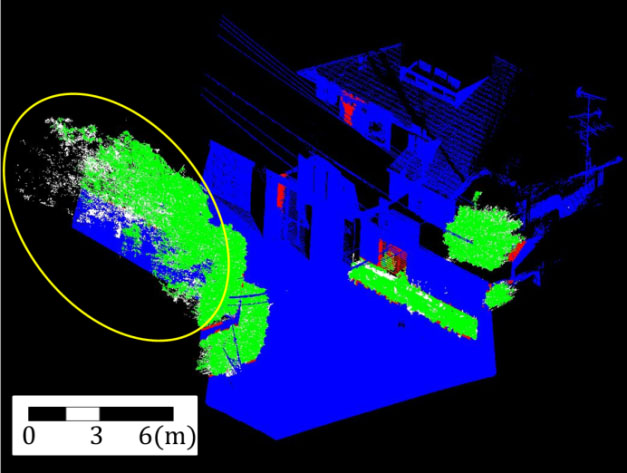
Vegetation automatically extracted from terrestrial LiDAR data. Green, blue, red and white denote True Positive, True Negative, False Positive and False Negative, respectively.
Airborne LiDAR, terrestrial LiDAR or Mobile Mapping System (MMS) can estimate enclosure index. This landscape index is defined as the ratio of the area occluded by objects to the entire visible area. If the objects are replaced with vegetation, we can calculate the green space ratio (GSR). We proposed the method for calculating the enclosure index and GSR from LiDAR data.
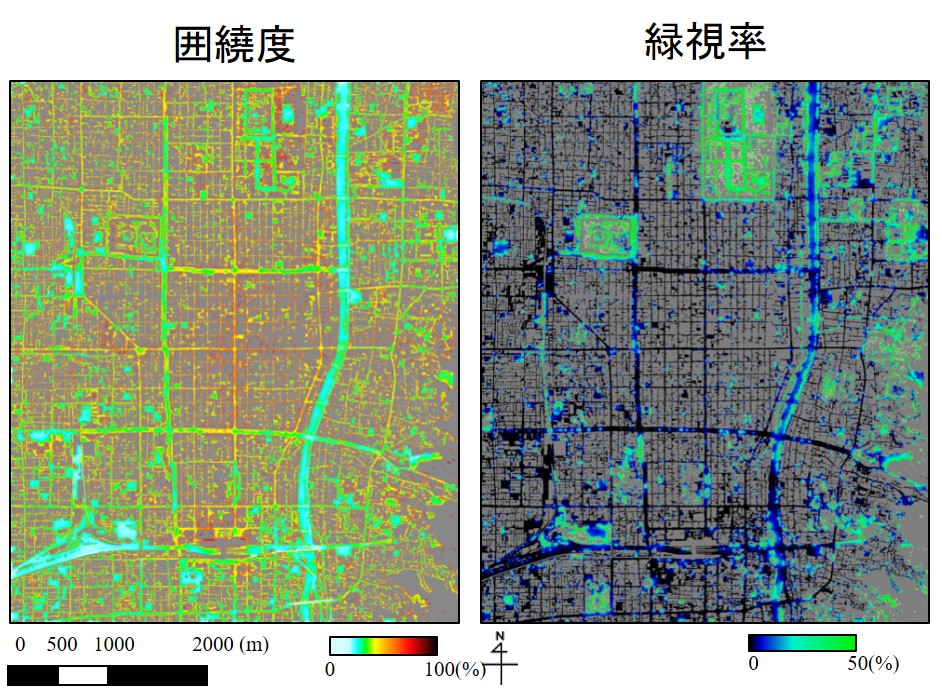

(Left) Enclosure index and (middle) GSR of Kyoto estimated from airborne LiDAR data and aerial photograph, and (right) GSR of Higashiyama Ward, Kyoto estimated from MMS data.
We proposed a method that automatically extracts areas and vehicle tracks from traffic video images recorded under varying sunlight conditions, including nighttime. The method is sufficiently robust to varying illumination conditions for application to daytime and nighttime video images.
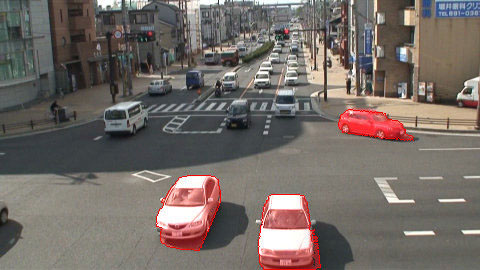

Vehicle areas extracted from video images


Track extracted from video images
We developed a method to automatically update digital road map (DRM) using probe data. We assumed the distribution of positional errors could be modeled by mixture probabilistic distribution model, and developed a method for updating the nodes' position with estimated model's parameters.
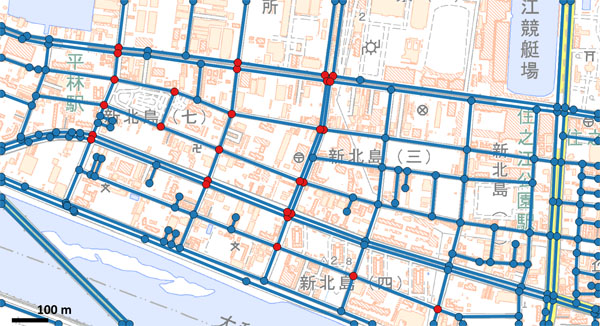
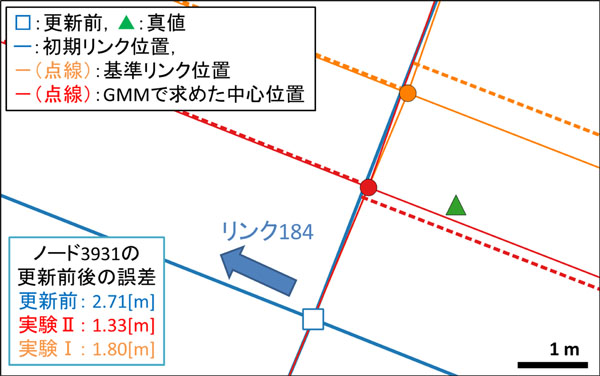
(Left) Study area and (right) result of automatic update of DRM.